Projeto 2: CONTROLANDO SERVO MOTOR COM POTENCIÔMETRO - ARDUINO
Projeto 2: ControleCONTROLANDO daSERVO PosiçãMOTOR COM POTENCIÔMETRO - ARDUINO
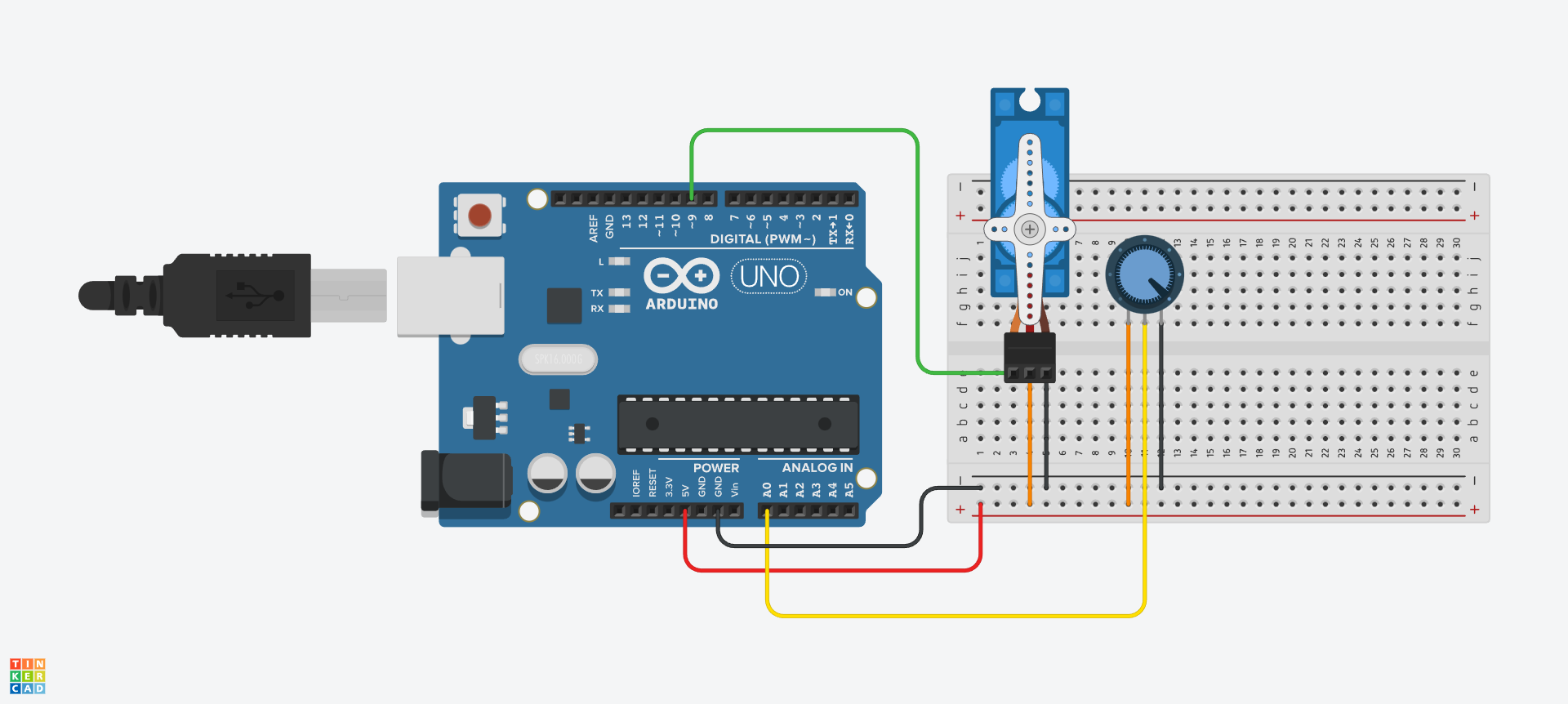
DESCRIÇÃO DO PROJETO: O projeto permitirá girar o servo motor em toda sua extensão permitida de ummeia volta, o soquete de trÊs pinos possui o GND tensão e sinal de pulso. A precisão do giro é verificada por meio do decodificador do servo motor, a qual efetua cálculos precisos.
Componentes:
- Servo Motor conectado ao pino 9 (ou outro pino PWM).
- Potenciômetro conectado ao pino A0.
#include <Servo.h>
Servo servo1; //cria um novo objeto servo
int potenciometroPino0 = 0; //conecta potenciometro na porta analogica 0
int valorDoPotenciometro = 0; //valor lido no pino 0
void setup (){
servo1.attach(9); //conecta o objeto servo1 ao pino 9
}//fim setup
void loop(){
valorDoPotenciometro = analogRead(potenciometroPino0); // lê
//um valor analógico do potenciometro de Passo0 a 255
valorDoPotenciometro = map(valorDoPotenciometro, 0, 1023, 0, 179);//mapeia
//o valor lido entre 0 a 1023 para uma valor ente 0 e 180
servo1.write(valorDoPotenciometro); // envia sinal para o servo posicionar
delay(15); //aguarda movimento do servo
}//fim loop/